
TomTom wants to help driverless vehicles know where they should go by using what it calls Highly Automated Driving (HAD) Maps to navigate busy city streets and make flawless turns, while knowing what’s up ahead.
TomTom initially announced that it was developing HAD Maps for the Autobahn network in Germany back in September. By adding 25,000 kilometres to cover the interstate and freeway networks in California and Michigan, as it announced at CES, it’s bringing the technology to a pilot project in North America.
Not that it’s the first time. When Audi made headlines by having an A7 drive itself from San Francisco to Las Vegas at last year’s CES, it was using an earlier stage of HAD Maps to navigate its way through the highways and streets.

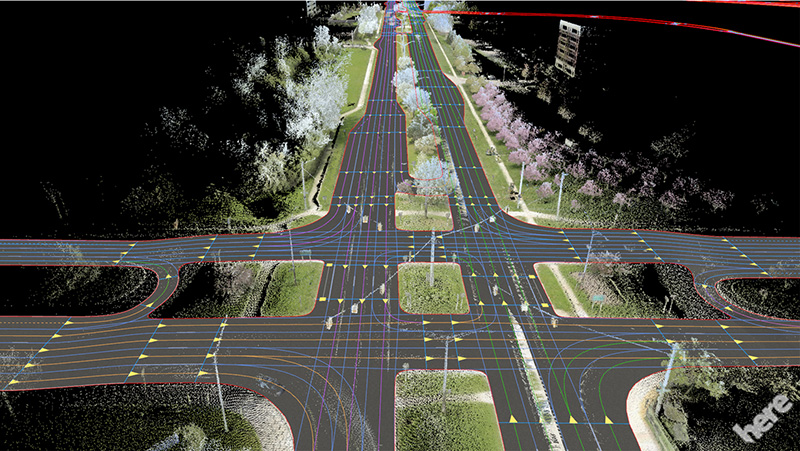
The map uses a 3D border-to-border model of the road and TomTom RoadDNA displays a pattern-based localization, shown visually in the mock-up on the show floor at CES. The idea is to match TomTom’s RoadDNA data with real-time data derived from in-car sensors and the HAD Map.
GPS precision is about 30 feet, but in order for autonomous driving to work, that needs to be whittled down to mere centimetres. A 3D reference map like this can tell a vehicle its precise position, even while travelling at high speeds or when changes occur to the roadside.
The primary caveat this mapping would solve is turns and other maneuvers where the vehicle may not be aware of what’s around the bend. Live traffic information that is now standard on TomTom’s maps and navigation units would also figure in by telling a vehicle of upcoming gridlock, even if it’s around the corner of a street a couple of turns away.
There’s no telling when this will be ready for primetime, since it’s contingent on progress in autonomous driving research. So far, Volkswagen and Bosch, one of the top Tier 1 suppliers, have signed on as R&D partners, melding the hardware and vehicle engineering expertise with TomTom’s mapping pedigree.
One wonders, however, what Google might be up to in a similar scenario. With its own maps in tow, and a publicly-known autonomous car program in place, it’s probably a safe bet that the brain trust in Mountain View, CA is eyeing the same marriage of sensory technology with digital mapping.
Matthieu Campion, marketing manager at TomTom Automotive, suggested Google wasn’t a competitor at all because it has a “different conception” of what a map does. Where Google may want to drive data to learn more about driving habits and perhaps tie that into its various other apps or businesses, Campion says TomTom is “the only independent business model-free digital map provider in the world.”
TomTom’s focus, he says, is to help in removing the responsibility from the driver and increasingly hand it over to the car with as much precision as possible.

Regardless of Google’s intentions, Nvidia is already moving forward with its own plans to do the same thing using HERE Maps, recently sold off by Nvidia to a consortium of car vendors. Called HD Maps, precision would be down to 20 centimetres to help the car know exactly where it is at any given time.
This is part of the Drive PX 2 platform based on Nvidia’s Tegra X1 processor. Using HD Maps, the end result isn’t altogether different from what TomTom is doing because it allows the car’s various sensors to piggyback onto the map to learn and react to changing conditions on the road.
This would also mean that maps have to be updated faster. HD Maps has a “self-healing” feature wherein data can be updated and delivered in real-time.
One example cited is a scenario where vehicle sensors detected a speed limit sign inconsistent with what is currently in the map, thereby updating the map accordingly so that other vehicles approaching the same spot have the new, correct information. Lane closures for construction, collisions or whatever other reason are another example, where other driverless vehicles could switch lanes earlier or re-route entirely if traffic is backed up.

Much like how there is a budding effort to assimilate automakers in adopting the same infotainment standard, another movement is afoot to have them to agree on a standardized format for how map data is transmitted to the cloud so that it’s compatible from one to another.
To date, testing is underway with 10 automakers who are trying it out on open roads in Silicon Valley and Michigan in the U.S., along with Germany, France and Japan. No word on when Canada might be used as a guinea pig, given how many open roads exist here, so we’ll have to watch all this unfold from afar.
MobileSyrup may earn a commission from purchases made via our links, which helps fund the journalism we provide free on our website. These links do not influence our editorial content. Support us here.
